

Printzipioatorloju-motor pauso-emailea: torloju bat eta azkoin bat erabiltzen dira lotzeko, eta azkoin finko bat hartzen da torlojua eta azkoina elkarrekiko biratzea eragozteko, horrela torlojua ardatzean mugi dadin. Oro har, bi modu daude eraldaketa hau gauzatzeko.
Lehenengoa barne-hariak dituen errotore bat motorrean eraikitzea da, eta gauzatzeamugimendu linealaErrotorearen eta torlojuaren barne-hariekin lotuz, eta horri torloju sarkorreko urrats-motorra deritzo. (Azkoina motorraren errotorearekin integratuta dago eta torlojuaren ardatza motorraren errotorearen erdigunetik igarotzen da. Erabiltzen denean, torlojua finkatu eta anti-errotazioa egin, motorra piztuta dagoenean eta errotorea biratzen denean, motorra linealki mugituko da torlojuan zehar. (Aitzitik, motorra finkatuta badago torlojua anti-errotazioan egiten den bitartean, torlojuak mugimendu lineala egingo du)
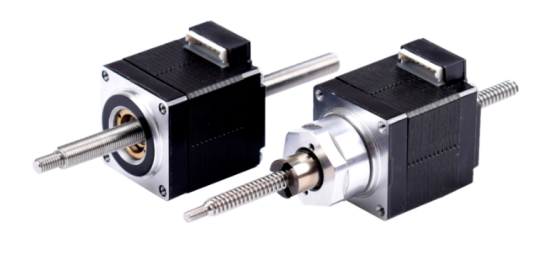
Ardatz zeharkako mota
Bigarrena hartzea datorlojuaMotorraren ardatzetik kanpo, motorraren kanpoaldean kanpoko trakzio-azkoin eta torloju-konexio baten bidez sartzen da, mugimendu lineala lortzeko; hau kanpoko trakzio motako torloju-pauso-motorra da. Emaitza diseinu sinplifikatu bat da, aplikazio askotan zehaztasun handiko mugimendu lineala zuzenean torloju-pauso-motor batekin egitea ahalbidetzen duena, kanpoko lotura mekanikorik instalatu gabe. (Azkoina motorrarekiko kanpoan dago eta trakzio-mekanismoari lotuta dago. Motorra biratzen denean, azkoina linealki mugitzen da torlojuan zehar.)
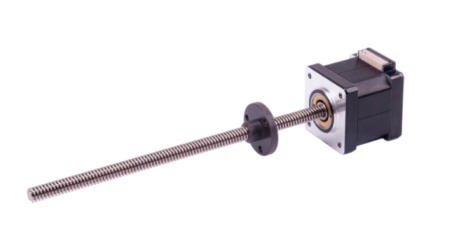
Kanpoko disko mota
Ardatz zeharkako pauso-motor linealaren aplikazio-abantailak:
Kanpotik eragindako pauso-motor linealak erabiltzen diren aplikazio-eszenatokiak alderatzeagida linealakArdatz osoko pauso-motor linealek abantaila bereziak dituzte, eta hauek 3 alderdi hauetan islatzen dira batez ere:
1.Sistemaren instalazio-errore handiagoa ahalbidetzen du:
Oro har, kanpotik eragindako pauso-motor lineal bat erabiltzen bada, torlojuaren eta gidari-euskarriaren arteko paralelismo eskasak sistema geldiaraztea eragin dezake. Hala ere, ardatz zeharreko pauso-motor linealekin, arazo larri hau asko arindu daiteke diseinuaren ezaugarri estrukturalei esker, sistemaren errore handiagoa ahalbidetzen baitute.
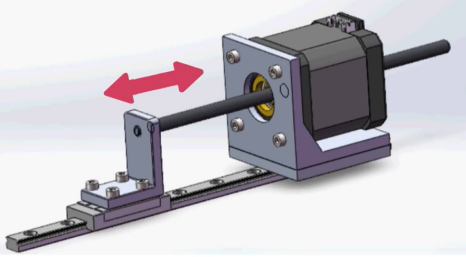
Motorra pizten denean, azkoina errotorearekin biratzen da eta torlojua kanpoko karga bati konektatuta dago eta lerro zuzen batean mugitzen da gidan zehar.
2.Torlojuaren abiadura kritikoak ez du mugarik:
Kanpotik eragindako motor lineal pauso-motorrak abiadura handiko mugimendu linealerako hautatzen direnean, normalean torlojuaren abiadura kritikoak mugatzen ditu. Hala ere, ardatz osoko motor lineal pauso-motor batekin, torlojua finkoa eta antirrokatzailea da, motorrak gida-bide linealaren irristailua mugitzeko aukera emanez. Torlojua geldirik dagoenez, ez dago torlojuaren abiadura kritikoak mugatzen abiadura handia lortzen duenean.
3.Honek instalazio-espazioa aurrezten du:
Ardatz osoko urrats-motor linealak ez du torlojuaren luzeratik haratagoko espazio gehigarririk hartzen, azkoina motorrean txertatuta dagoen egitura-diseinuari esker. Hainbat motor muntatu daitezke torloju berean. Motorrak ezin dira elkarren artean "pasatu", baina haien mugimenduak elkarrengandik independenteak dira. Beraz, aukera egokia da espazio-eskakizun zorrotzagoak dituzten aplikazioetarako.
Informazio gehiago nahi izanez gero, jarri gurekin harremanetan helbide honetan:amanda@kgg-robot.comedo+WA0086 15221578410.
Argitaratze data: 2025eko otsailaren 11a




